設計者のための設計手帳
製品設計者のための基礎技術情報サイト
直動&揺動運動する負荷トルクの計算例
ここでは直動系と揺動系が混ざった動作におけるモーター負荷計算の計算例を紹介します。
【モーター負荷トルク計算】
右図のようにモータ直結ギヤと従動ギヤがあります。
従動ギヤとアームは結合されており、モータが回転するとアームは従動ギヤの中心を軸として円孔を描くように揺動します。
この時、ワークはアームに追従しワーク用のガイドに沿って直線運動をします。
ぜんまいバネは常に一定の力でワークを上へ引っ張りあげるものとします。また、ワークとアームの関係は、ワークはアームに押し下げられたり、押し上げられたり、追従するような機構になっているものとします。
モーター負荷トルクTを求めましょう。
但し、 ・モーター従動ギヤ半径:r=2(cm)
・モーター従動ギヤ質量:M3=10(g)
・モーター直結ギヤ半径:R=3(cm)
・モーター直結ギヤ質量:M4=15(g)
・アーム幅、長さ:a=2(cm)、b=14(cm)
・アーム質量:M2=80(g)
・ワーク質量:M1=330(g)
・加速(減速)時間:t1(t3)=0.05(s)
・等速時間:t2=0.35(s)
・モーター回転角度:θ=360(°)
・ワーク移動量:E=11(cm)
↓
・モーター1回転当たりの移動量:
A=(360x11/360)x(3/2)=16.5(cm)
↑ギヤ比=(モータギヤ/ワークギヤ)
(A=(360xE/θ)xギヤ比)
・ぜんまいバネ:Fs=250(gf) (一定)


モーター負荷トルクTは下記式で求められます。
T=Tr(加速トルク)+Tc(外的負荷トルク)
※外的負荷トルクは主に摩擦トルクのことです。
【回転系負荷トルク】 【直動系負荷トルク】
T= 〔Ir x (モータギヤ/ワークギヤ)^2〕 x ω' T= Ic x ω'
(モータギヤ/ワークギヤ)の2乗 但し、Ic=Jc/gで、Jc=Mc x (A/2π)^2 です。
(A/2π)の2乗
それぞれを求めてみましょう。
●まずは、加速度によって生じる物体のイナーシャによる負荷トルク(Tr)を求めます。
この時、回転系の負荷と直動系の負荷に分けて考えます。
回転運動系のイナーシャは、<モーターギヤ、従動ギヤ、アーム>になります。
直動運動系のイナーシャは、<ワーク>になります。
・回転運動系イナーシャIr (g・cm・s2)
Ir=(GD^2/4)/g=Jr/g
ここで、Jr= Mr x K^2 = Mr x (r^2/2) (g・cm2)
(Kの2乗) (rの2乗/2)
但し、Mr:質量(ギヤの質量) (g) r:回転半径(ギヤの半径) (cm)
g:重力加速度 980 (cm/s2)
より、
Ir(従動ギヤ)=10x(2x2/2)/980=0.02 (g・cm・s2) Ir(従動ギヤ)=0.02 (g・cm・s2)
Ir(モーターギヤ)=15x(3x3/2)/980=0.07 (g・cm・s2) Ir(モーターギヤ)=0.07 (g・cm・s2)
次に、Ir(アーム)を求めます。
同じ回転運動系のイナーシャですが、長方形の場合、K^2は下記になります。
K^2=(a^2+b^2+12xL^2)/12
(↑Kの2乗=(aの2乗+bの2乗+12xLの2乗)/12)
但し、aは長方形の幅(cm)、bは長さ(cm)
また、回転軸が重心X0から外れるX1軸の場合、LはX0軸とX1軸の距離(cm)
形状により、K^2は異なりますので、計算の際には注意が必要です。
ここでは、L=5(cm)とします。
実際の設計業務においては、重心はCADで簡単に求めたられますのでそれを活用したりします。
Ir(アーム)=(80 x (2x2 + 14x14 + 12x5x5)/12)/980 =3.4
Ir(アーム)=3.4 (g・cm・s2)
・直動運動系イナーシャIc (g・cm・s2) を求めます。
Ic=(GD2/4)/g=Jc/g
ここで、
直動運動する物体のイナーシャ(慣性モーメン)の式
↓
Jc=Mc x (A/2π)^2 (g・cm2)
(A/2π)の2乗
但し、Mc:質量(ワークの質量) (g) g:重力加速度 980 (cm/s2)
A:単位移動量 (cm/rev)
↑単位:モーター1回転当たりの移動量(cm)
より、
Ic=(330)x(16.5/2xπ)x(16.5/2xπ)/980=2.32 (g・cm・s2) Ic=2.32 (g・cm・s2)
よって、加速トルクTrは、
回転系(従動ギヤ)の加速トルク: Tr= Ir x(モータギヤ/ワークギヤ)^2 x ω'=0.02 x (3/2)x(3/2) x ω'
<補足:↑従動ギヤが対象で、モーターギヤは直結してるので、ギヤ比は1>
回転系(モーターギヤ)の加速トルク: Tr= Ir x ω'=0.07 x ω'
回転系(アーム)の加速トルク: Tr= Ir x(モータギヤ/ワークギヤ)^2 x ω'=3.4 x (3/2)x(3/2) x ω'
ギヤ比(3/2=1.5倍)により、アームの揺動量は、1.5倍になっています。
イナーシャはギヤ比の2乗に比例するので、アームのイナーシャは、1.5x1.5=2.25倍になります。
直動系の加速トルク: Tr= Ic xω'=2.32xω'
但し、Ir :回転運動系 イナーシャ (g・cm・s2) Ic :直動運動系 イナーシャ (g・cm・s2)
ω' :モーター 角加速度 (rad/s2)
●ω'を求めます。
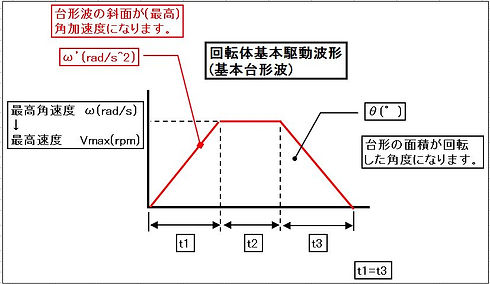
(最高)角加速度ω' (rad/s2)
基本駆動波形は、右図のような基本台形波です。
まずは最高角速度ωを求めます。
回転角度は台形の面積となるので、
ωx(t1+t2)=θxπ/180 (rad/s)
但し、
t1、t2はX軸の時間 (s) θは回転角度 (°)
ω=θxπ/(180x(t1+t2)) (rad/s)
より、
ω=360xπ/(180x(0.05+0.35))=15.7 (rad/s)
ここで、求める最高角加速度ω'は台形波の斜辺となります。
よって、
ω'=ω/t1=〔θxπ/180x(t1+t2)〕/t1 (rad/s2)
より、
ω'=15.7/0.05=314 (rad/s2) ω'=314 (rad/s2)
よって、
回転系の加速トルク(従動ギヤ):Tr=Ir x(モータギヤ/ワークギヤ)^2 x ω'
=(0.02) x (3/2) x (3/2) x 314 =14.13 (g・cm)
回転系の加速トルク(モーターギヤ):Tr=Ir x ω' =0.07 x 314 =21.98 (g・cm)
回転系の加速トルク(アーム):Tr=Ir x(モータギヤ/ワークギヤ)^2 x ω'
=(3.4) x (3/2) x (3/2) x 314 =2402.1 (g・cm)
直動系の加速トルク:Tr=Ic xω' =2.32x314=728.48 (g・cm)
回転系の加速トルク Tr=2438.21 (g・cm)
直動系の加速トルク Tr=728.48 (g・cm)
このように、加速に伴うトルクが、とても大きな数値になっています。
これは、加速時間が0.05sという短い時間で加速させていることと、運動量をギヤ比により増加させたことによって、
イナーシャがギヤ比の2乗で効いてきたため、このような数値になっていることが、分かると思います。
また、このような場合、使用するモーターによって、負荷イナーシャとモーター許容イナーシャを比較し、チェックを
行うことが大切な場合もありますので、注意が必要です。
●次に外的負荷(バネや摩擦など)によって生じる物体の外的負荷トルク(=摩擦トルク)Tcを求めます。
補足:ぜんまいバネの力Fsは250(gf)で、常に一定の力でワークを上側に引っ張り上げていることとします。
直動運動する外的負荷トルク(摩擦トルク)の式
↓
Tc=F x D/(2 x n x i) (g・cm)
水平の場合:F=Fa + μx N
↑バネ力など ↑摺動抵抗(Nは垂直抗力)
傾きがある場合:F=Fa + mg x (sinθ + μcosθ) ←(μx Nを分解した式)
↑バネ力など ↑傾き方向の力 ↑垂直方向の力
但し、F:直動運動方向の力 (gf) D:モーターギヤ直径 (cm) n:効率(0.85~0.95) i:減速比
Fa:外力(バネなど) (gf) μ:摺動面の摩擦係数(0.05) N:垂直方向荷重(=mg) (gf)
m:ワークとラックの総質量 (g) g:重力加速度 980 (cm/s2) θ:傾き角度 (°)
では、まずはFを求めます。
垂直なので、F=Fa+μN のN(=垂直抗力)は、”0”になります。
ここで、Faを考えます。
Faは、バネ力などの負荷になりますが、この場合、バネ力が一定のため、ワークとバネ力の差が、総質量となり、負荷
になります。
今回の例題の場合、バネ力が常に一定で、且つ、ワークを上側に引っ張り上げていることを念頭に、上り、下りのそれ
ぞれの加速、減速時において、負荷を助ける側になるのか、負荷を掛ける側になるのか、を考慮する必要があります。
本例題のようにバネ力が常に一定で且つワークを引っ張り上げている場合は、
Fa= Fs + W = -250 + 330 = 80(gf) になります。
↑バネ力 ↑負荷となる総質量
ここで、〔上り〕と〔下り〕でFaは異なることに注意します。
●〔上り〕の加速時は、"+"になります。⇒ (トルクを助けない方向<モーターに負荷をかける方向>)
●〔上り〕の減速時は、"-"になります。⇒ ((トルクを助ける方向<モーターに負荷をかける方向>)
●〔下り〕の加速時は、"-"になります。⇒ (トルクを助ける方向<モーターに負荷をかけない方向>)
●〔下り〕の減速時は、"+"になります。⇒ (トルクを助けない方向<モーターに負荷をかける方向>)
より、〔上り〕と〔下り〕に分けてそれぞれのFaを求めます。
モーターに負荷をかける方向:〔上りの加速時〕〔下りの減速時〕 Fa=+80(gf)
モーターの負荷を助ける方向:〔上りの減速時〕〔下りの加速時〕 Fa=-80(gf)
⇒モーターに最大負荷をかけるのは、〔上りの加速時〕
よって、
直動運動する外的負荷トルク(摩擦トルク)は、Tc=F x D/(2 x n x i) (g・cm)より、
Tc = 80 x (3x2)/(2 x 0.95 x 3/2) = 480/2.85 = 168.42
↑F(上り) ↑D ↑n ↑ギヤ比(=モータギヤ/従動ギヤ)
Tc=168.42(g・cm)
ここで、上述で計算した結果をまとめます。
回転系の加速トルク Tr=2438.21 (g・cm)
直動系の加速トルク Tr=728.48 (g・cm)
外的(摩擦)負荷トルク(上り) Tc=168.42 (g・cm)
”上り”の加速時に発生する、モーター最大負荷トルクは、
T= Tr + Tc
↑回転&直動系の加速トルク ↑外的負荷トルク(=摩擦トルク)
より、
T=(2438.21+728.48)+168.42=3335.11 (g・cm) モーター最大負荷トルクT=3335.11(g・cm)
このように、モーター最大負荷トルクの多くを加速トルクが占める場合、実際の駆動制御においては、下降時と上昇時の
速度を変更(下降時は速く、上昇時は遅く、など)したり、加減速時間を見直したり、バネ力やワーク質量を見直しするなど
して、負荷トルクを調整したりするのが一般的な手法だと思いますが、場合によっては、計算された負荷を満たすモーター
を選定しなければならない場合もあり、実業務では、それぞれの条件下により、異なってくると思います。
いずれにせよ、このように計算をしておくこで、どこを調整すれば、効率よく負荷トルクを調整できるのか、を視覚化できる
ことは、計算するメリットの1つであると言えるでしょう。



point

point
